🌐 GNN for Node-Level Regression: Predicting Sine Waves#
Author: Loïc Bachelot
Goal: This notebook demonstrates how to use a GNN to predict 1D sine wave signals at each node of a synthetic graph.
📘 Overview#
Graphs provide a natural framework to represent structured spatial relationships, like seismic stations or sensor networks.
In this notebook:
Each node in the graph has spatial coordinates and a local signal (a sine wave).
The task is to predict the full sine wave at each node based on the graph structure and node features.
We use GNNs with message passing to exploit the spatial relationships between nodes.
We will:
Generate synthetic 3D graphs with signals delayed based on spatial distance
Define a GNN model for node-level regression
Train the model to recover sine signals from noisy observations
Visualize and evaluate the predictions at the node level
This setup introduces important concepts for modeling spatiotemporal data with graph-based deep learning!
📦 Imports and Setup#
We first import the core libraries needed for:
Graph data manipulation (
torch_geometric)Deep learning (
torch)Numerical operations (
numpy)Visualization (
matplotlib)
This setup ensures we have all the tools needed for dataset generation, model training, and evaluation.
import torch
import torch_geometric
print(torch.__version__)
print(torch_geometric.__version__)
2.6.0+cu124
2.6.1
%pip install pyg_lib torch_scatter torch_sparse torch_cluster torch_spline_conv -f https://data.pyg.org/whl/torch-2.6.0+cu124.html
Looking in links: https://data.pyg.org/whl/torch-2.6.0+cu124.html
Requirement already satisfied: pyg_lib in /srv/conda/envs/notebook/lib/python3.12/site-packages (0.4.0+pt26cu124)
Requirement already satisfied: torch_scatter in /srv/conda/envs/notebook/lib/python3.12/site-packages (2.1.2+pt26cu124)
Requirement already satisfied: torch_sparse in /srv/conda/envs/notebook/lib/python3.12/site-packages (0.6.18+pt26cu124)
Requirement already satisfied: torch_cluster in /srv/conda/envs/notebook/lib/python3.12/site-packages (1.6.3+pt26cu124)
Requirement already satisfied: torch_spline_conv in /srv/conda/envs/notebook/lib/python3.12/site-packages (1.2.2+pt26cu124)
Requirement already satisfied: scipy in /srv/conda/envs/notebook/lib/python3.12/site-packages (from torch_sparse) (1.15.1)
Requirement already satisfied: numpy<2.5,>=1.23.5 in /srv/conda/envs/notebook/lib/python3.12/site-packages (from scipy->torch_sparse) (1.26.4)
Note: you may need to restart the kernel to use updated packages.
import pickle
import shutil
import os
import numpy as np
import matplotlib.pyplot as plt
from torch_geometric.data import Data
import torch
import torch_geometric
from torch_geometric.transforms import KNNGraph
from torch_geometric.data import InMemoryDataset, Data
from torch.nn import Linear, Parameter, LeakyReLU, Conv2d, MaxPool1d, Conv1d
from torch_geometric.nn import GCNConv, MessagePassing, MLP, GATv2Conv
from scipy.spatial import distance
from torch_geometric.utils import add_self_loops, degree
from tqdm import tqdm
import time
import random
import os
🖼️ Visualization Helper Functions#
We define two visualization utilities to better explore and understand the synthetic graphs.
🌐 1. visualize_graph_torch()#
Plots the graph structure with flexible coloring options.
Edges are plotted as light gray lines connecting nodes.
Nodes are colored based on:
An internal attribute (e.g.,
"signal","attention")Or external per-node values (e.g., prediction errors).
Origin (hidden point that controls the delay) is plotted as a red cross (×) if available.
A colorbar is automatically generated to aid interpretation.
✅ Useful for visualizing spatial structure, feature distributions, and model errors.
📈 2. plot_signals_subplots_by_distance()#
Visualizes the individual node signals sorted by distance from the hidden origin.
One subplot per node: each shows the sine waveform observed at that node.
Nodes are sorted by increasing distance to the origin.
A vertical red dashed line marks the expected arrival time of the sine wave based on distance and velocity.
✅ Useful for understanding how distance delays the waveform across the graph.
def visualize_graph_torch(g, color=None, node_values=None, cmap="viridis", ax=None, title=None):
"""
Visualize a graph structure with nodes colored by a selected attribute or external values.
Args:
g (Data): PyG graph object with at least 'edge_index' and 'pos'. May also have 'origin'.
color (str, optional): Node attribute key inside `g` to color nodes (e.g., 'signal').
node_values (Tensor, optional): External array of node values for coloring (overrides `color` if provided).
cmap (str, optional): Matplotlib colormap name for node coloring.
ax (matplotlib axis, optional): Axis to plot into (if None, create a new figure).
title (str, optional): Title for the plot.
Behavior:
- Nodes are colored based on either an internal attribute or external values.
- Edges are drawn as light gray lines between connected nodes.
- A colorbar is added automatically when node coloring is used.
- If `origin` is present, it is shown as a red "x" marker.
"""
if ax is None:
fig, ax = plt.subplots(figsize=(6, 6))
# --- Draw edges ---
for edge in g.edge_index.T:
ax.plot(
[g.pos[edge[0]][0], g.pos[edge[1]][0]],
[g.pos[edge[0]][1], g.pos[edge[1]][1]],
color='lightgray', linewidth=0.8, zorder=0
)
# --- Determine node coloring ---
if node_values is not None:
node_colors = node_values
elif color is not None:
node_colors = g[color][:, 0].cpu().numpy()
else:
node_colors = "blue" # fallback color
# --- Draw nodes ---
scatter = ax.scatter(
g.pos[:, 0].cpu(),
g.pos[:, 1].cpu(),
c=node_colors,
cmap=cmap,
s=150,
edgecolors='black'
)
# --- Plot origin if available ---
if hasattr(g, 'origin'):
origin = g.origin.cpu().numpy()
ax.plot(origin[0], origin[1], 'rx', markersize=12, markeredgewidth=3, label="Origin")
ax.legend(loc="upper right")
# --- Add colorbar if appropriate ---
if node_values is not None or color is not None:
plt.colorbar(scatter, ax=ax, label="Node Value")
if title:
ax.set_title(title)
ax.set_xlabel("x")
ax.set_ylabel("y")
ax.grid(True, linestyle="--", alpha=0.5)
if ax is None:
plt.show()
def plot_signals_subplots_by_distance(data, velocity=0.25, sampling_rate=1.0, title="Signals by distance to origin"):
"""
Plot each node's signal in its own subplot, ordered by distance to the hidden origin.
Args:
data (Data): PyG graph object containing:
- pos: [num_nodes, 2] node spatial coordinates
- signal: [num_nodes, signal_size] node waveforms
- origin: [2] hidden origin point (required to compute distance)
velocity (float): Wave propagation speed (units per second).
sampling_rate (float): Sampling rate in Hz (samples per second).
title (str): Figure title.
Behavior:
- Sorts nodes by their distance to the origin.
- Plots each node's signal in a separate subplot.
- Marks the expected arrival sample with a red vertical line.
"""
pos = data.pos.cpu().numpy()
signals = data.signal.cpu().numpy()
origin = data.origin.squeeze().cpu().numpy()
num_nodes = pos.shape[0]
# Compute distances from origin and convert to sample index
distances = np.array([distance.euclidean(origin, pos[i].tolist()) for i in range(num_nodes)])
arrival_samples = (distances / velocity * sampling_rate).astype(int)
sort_idx = np.argsort(distances)
# Plot one subplot per station
fig, axs = plt.subplots(num_nodes, 1, figsize=(10, 2 * num_nodes), sharex=True)
for i, idx in enumerate(sort_idx):
ax = axs[i]
signal = signals[idx]
ax.plot(np.arange(len(signal)), signal, color='black', linewidth=1)
ax.axvline(arrival_samples[idx], color='red', linestyle='--', linewidth=1, label='arrival')
ax.set_ylabel(f"{distances[idx]:.2f}", rotation=0, labelpad=25)
ax.grid(True, linestyle='--', alpha=0.3)
axs[-1].set_xlabel("Time (samples)")
fig.suptitle(title, fontsize=14)
plt.tight_layout(rect=[0, 0, 1, 0.98])
plt.show()
🧹 Synthetic Dataset Creation#
We create a synthetic graph dataset where each node has:
Random 2D spatial coordinates
A sine wave signal, delayed according to its distance from a hidden origin point
The task is to predict the correct sine signal at each node, using the spatial structure and nearby signals as context.
🛠️ Components:#
add_edge_weight(g)
A utility function that computes edge weights based on inverse spatial distance, helping GNN layers better prioritize closer nodes.SinDatasetClass
A PyTorch GeometricInMemoryDatasetthat:Generates random graphs
Assigns sine signals to nodes with distance-based delays
Saves origin coordinate of signal
Optionally applies transformations like edge construction
This synthetic setup allows us to benchmark node-level regression performance.
def add_edge_weight(g):
"""
Compute edge features as (dx, dy) vectors between connected nodes.
"""
edge_attrs = []
for edge in g.edge_index.T:
src = g.pos[edge[0]]
tgt = g.pos[edge[1]]
delta = tgt - src # (dx, dy)
edge_attrs.append(delta)
# Stack into [num_edges, 2] tensor
g.edge_attr = torch.stack(edge_attrs, dim=0).type(torch.float32)
return g
class SinDataset(InMemoryDataset):
"""
Synthetic dataset for node-level sine wave reconstruction,
using a **fixed set of node positions ("stations")** across all graphs.
Each graph contains:
- Same station layout (pos)
- Different random hidden origin
- Signals delayed based on distance to origin
"""
def __init__(self, root, transform=None, pre_transform=None, nb_graph=10, nb_stations=15):
self.nb_graph = nb_graph
self.nb_stations = nb_stations
np.random.seed(42)
# Generate fixed station positions once
self.node_positions = torch.tensor(
np.random.uniform(0, 6, size=(self.nb_stations, 2)),
dtype=torch.float
)
super(SinDataset, self).__init__(root, transform, pre_transform)
self.data, self.slices = torch.load(self.processed_paths[0], weights_only=False)
@property
def raw_file_names(self):
# No external raw files
return 0
@property
def processed_file_names(self):
return 'data.pt'
def process(self):
data_list = []
# Dataset parameters
frequency = 1.0 # Hz
velocity = 0.25 # wave speed
sampling_rate = 1.0 # Hz
noise_std = 0.05 # Gaussian noise level
# Base sine wave used in signal synthesis
base_sine_wave = np.sin(np.arange(SIGNAL_SIZE))
for _ in range(self.nb_graph):
pos = self.node_positions
# Random hidden origin point
origin = np.random.randint(0, 6, size=2)
origin_tensor = torch.tensor(origin, dtype=torch.float)
signal_list = []
for i in range(self.nb_stations):
dist = distance.euclidean(origin, pos[i].tolist())
delay = dist / velocity
delay_samples = int(delay * sampling_rate)
# Start with noise
waveform = np.random.normal(0, noise_std, size=SIGNAL_SIZE)
# Add delayed sine wave if within bounds
if delay_samples < SIGNAL_SIZE:
insert_length = SIGNAL_SIZE - delay_samples
waveform[delay_samples:] += base_sine_wave[:insert_length]
signal_list.append(waveform)
signal = torch.tensor(np.array(signal_list), dtype=torch.float32).reshape(self.nb_stations, SIGNAL_SIZE)
g = Data(pos=pos, signal=signal, origin=origin_tensor) # y shape: (1, 2)
data_list.append(g)
# Apply preprocessing transformations if specified
if self.pre_transform is not None:
data_list = [self.pre_transform(data) for data in data_list]
data_list = [add_edge_weight(data) for data in data_list]
# Save processed graphs
data, slices = self.collate(data_list)
torch.save((data, slices), self.processed_paths[0])
# Parameters
SIGNAL_SIZE = 25
NB_GRAPHS = 5000
NB_STATION = 30
# Dataset root path
dataset_root = "./sin_train_masked"
# 🚨 Remove old processed data if it exists
processed_path = os.path.join(dataset_root, "processed")
if os.path.exists(processed_path):
print(f"Removing previously processed dataset at {processed_path}...")
shutil.rmtree(processed_path)
# Create fresh dataset
dataset = SinDataset(
root=dataset_root,
pre_transform=KNNGraph(k=6, loop=False, force_undirected=True),
nb_graph=NB_GRAPHS,
nb_stations=NB_STATION
)
dataset
Removing previously processed dataset at ./sin_train_masked/processed...
Processing...
Done!
SinDataset(5000)
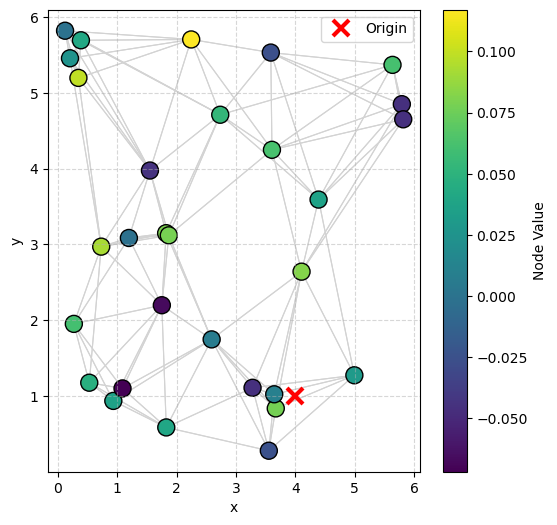
🔍 Exploring a Sample Graph#
Let’s inspect one sample from the synthetic dataset to understand its structure.
Each graph is stored as a PyTorch Geometric Data object, which includes:
pos: Node 2D spatial coordinates[num_nodes, 2]signal: Node signals (sine waves delayed by distance to a hidden origin)[num_nodes, signal_length]origin: The hidden 2D origin point[2]used to generate node signals (not directly used for supervision here)edge_index: Connectivity information between nodes (edges)edge_attr: distance weights for edges (both in x and y)
This compact graph-based representation allows flexible training for node-level prediction tasks,
while preserving spatial and relational structure essential for learning.
data = dataset[0]
data
Data(pos=[30, 2], signal=[30, 25], origin=[2], edge_index=[2, 216], edge_attr=[216, 2])
visualize_graph_torch(data, color='signal')
plot_signals_subplots_by_distance(data)

🧪 Train/Validation/Test Split and Batching#
After generating the full synthetic dataset, we split it into three subsets:
80% for training
10% for validation
10% for testing
We then use torch_geometric.loader.DataLoader to batch graphs during training and evaluation.
🧱 How batching works in PyTorch Geometric:#
Nodes, edges, and features from multiple graphs are merged into a single “big graph.”
A
batchvector tracks which nodes belong to which original graph.This enables efficient parallel processing across many small graphs in one forward pass.
We set a batch_size=64 and shuffle only the training set to ensure randomness while preserving validation/test consistency.
from torch_geometric.loader import DataLoader
from sklearn.model_selection import train_test_split
train_dataset, val_dataset = train_test_split(dataset, train_size=0.8, random_state=42)
val_dataset, test_dataset = train_test_split(val_dataset, train_size=0.5, random_state=42)
train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True)
val_loader = DataLoader(val_dataset, batch_size=64, shuffle=False)
test_loader = DataLoader(test_dataset, batch_size=64, shuffle=False)
print(f"nb graph train ds= {len(train_dataset)}, nb graph val ds= {len(val_dataset)}, nb graph test ds= {len(test_dataset)}")
nb graph train ds= 4000, nb graph val ds= 500, nb graph test ds= 500
🧠 GNN Model Definition: BasicNet#
We define a Graph Neural Network (GNN) model designed for node-level sine wave regression.
🏗️ Architecture Overview:#
Signal Feature Extraction
Each node’s raw signal is processed through a simple MLP to extract compact local features.Feature Fusion
The extracted signal features are concatenated with the node’s spatial coordinates (x, y) to create a combined feature vector.Graph Attention Message Passing
We apply aGATv2Convlayer to propagate and aggregate information between neighboring nodes:Attention mechanisms allow the model to learn which neighbors are most informative.
Edge weights based on spatial distances are provided as additional input.
Multi-Layer Perceptron (MLP) Decoder
After message passing, another MLP refines the hidden features and predicts the full sine wave signal at each node.
🔥 Key Difference:
Instead of predicting a single global coordinate, this model predicts a full waveform per node.
📤 Output:#
For each node, the model outputs a predicted sine wave of the same length as the true target signal.
The output is bounded in the range [-1, 1] using a
tanh()activation, consistent with sine wave values.
class BasicNet(torch.nn.Module):
"""
A minimal Graph Neural Network for node-level signal reconstruction.
Architecture:
- MLP to fuse spatial coordinates and raw signal
- Single GATv2Conv layer for graph message passing
- MLP decoder to reconstruct the node signals
"""
def __init__(self, channels_x, channels_y, hidden_channels=32, dropout=0.3):
super(BasicNet, self).__init__()
torch.manual_seed(1234)
# --- Feature fusion ---
self.mlp_in = MLP([channels_x + channels_y, hidden_channels])
# --- Graph convolution ---
self.conv = GATv2Conv(
in_channels=hidden_channels,
out_channels=hidden_channels,
heads=1,
concat=True,
edge_dim=2
)
self.conv2 = GATv2Conv(
hidden_channels,
hidden_channels,
heads=1,
concat=True,
edge_dim=2
)
# --- Decoder ---
self.mlp_out = MLP([hidden_channels, channels_y])
def forward(self, x, signal, edge_index, edge_attr, mask):
"""
Forward pass.
Args:
x (Tensor): Node features (e.g., spatial coordinates) [num_nodes, channels_x]
signal (Tensor): Node signals (raw) [num_nodes, channels_y]
edge_index (Tensor): Edge index for the graph
edge_weight (Tensor): Edge weights
mask (Tensor): Mask indicating supervised nodes
Returns:
Tensor: Reconstructed node signals [num_nodes, channels_y]
"""
# Apply mask (simulate missing inputs)
signal = (signal.T * (~mask)).T
# --- Feature fusion ---
out = torch.cat([x, signal], dim=-1)
out = self.mlp_in(out)
# --- Graph convolution ---
out = self.conv(out, edge_index, edge_attr)
out = self.conv2(out, edge_index, edge_attr)
# --- Final decoding ---
out = self.mlp_out(out)
return out.tanh()
@staticmethod
def get_mask(graph_size: int, rate: float, device):
"""
Randomly generate a node mask for supervision during training.
Args:
graph_size (int): Number of nodes in the graph.
rate (float): Fraction of nodes to supervise (between 0 and 1).
device: Target device (CPU or GPU).
Returns:
Tensor: A boolean mask indicating which nodes to supervise.
"""
mask = torch.rand(graph_size, device=device) < rate
return mask
🚀 Training Loop#
This section defines the training and validation routines for our GNN model, as well as a simple early stopping mechanism.
🛠️ Training and Validation Helper Functions#
Before launching training, we define helper functions to structure the training and validation process.
⏹️ Early Stopping: EarlyStopper#
Early stopping monitors the validation loss to detect overfitting.
It stops training when the model stops improving for a given number of epochs (patience).
This helps avoid:
Wasting compute resources
Overfitting to the training set
🛠️ Training Function: train()#
For each batch of graphs:
Dynamically generate a random mask selecting a subset of nodes for supervision.
Perform a forward pass through the model using the generated mask (the mask modifies the input signals).
Compute the loss only on the masked (supervised) nodes.
Backpropagate and update model parameters.
🧠 Why use a dynamic mask?
In node-level prediction, we don’t want to supervise all nodes.
In this use case, the target is the input itself, so without masking, a node could trivially copy its input!
Dynamic masking ensures the model must infer missing signals by leveraging neighborhood information.
Different nodes are randomly selected in each batch, improving generalization.
The loss is computed only for the nodes selected by the dynamic mask.
🧪 Validation Function: validation()#
During validation:
We also dynamically generate a new random mask per batch.
This ensures evaluation matches training conditions (masked input, selective supervision).
Gradients are disabled using
@torch.no_grad()for efficiency.
⚡ Note:
Message passing still uses the full graph (all nodes), but supervision happens only on the masked nodes!
class EarlyStopper:
"""
A class for early stopping the training process when the validation loss stops improving.
Parameters:
-----------
patience : int, optional (default=1)
The number of epochs with no improvement in validation loss after which training will be stopped.
min_delta : float, optional (default=0)
The minimum change in the validation loss required to qualify as an improvement.
"""
def __init__(self, patience=1, min_delta=0):
self.patience = patience
self.min_delta = min_delta
self.counter = 0
self.min_validation_loss = np.inf
def early_stop(self, validation_loss):
"""
Check if the training process should be stopped.
Parameters:
-----------
validation_loss : float
The current validation loss.
Returns:
--------
stop : bool
Whether the training process should be stopped or not.
"""
if validation_loss < self.min_validation_loss:
self.min_validation_loss = validation_loss
self.counter = 0
elif validation_loss > (self.min_validation_loss + self.min_delta):
self.counter += 1
if self.counter >= self.patience:
return True
return False
def train(dataloader, device, mask_rate=0.1):
"""
Train the model with dynamic masking per batch.
Args:
dataloader : DataLoader — training data.
device : torch.device
mask_rate : float — fraction of nodes supervised per graph.
Returns:
mean_loss : float — mean training loss across batches.
"""
model.train()
mean_loss = 0
for batch in dataloader:
batch = batch.to(device)
# Generate dynamic supervision mask BEFORE forward pass
mask = model.get_mask(batch.num_nodes, rate=mask_rate, device=device)
# Forward pass using masked input
out = model(batch.pos, batch.signal, batch.edge_index, batch.edge_attr, mask)
# Compute loss only on supervised nodes
loss = criterion(out[mask], batch.signal[mask])
optimizer.zero_grad()
loss.backward()
optimizer.step()
mean_loss += loss.item()
return mean_loss / len(dataloader)
@torch.no_grad()
def validation(dataloader, device, mask_rate=0.1):
"""
Validate the model with dynamic masking per batch.
Args:
dataloader : DataLoader — validation data.
device : torch.device
mask_rate : float — fraction of nodes supervised per graph.
Returns:
mean_loss : float — mean validation loss across batches.
"""
model.eval()
mean_loss = 0
for batch in dataloader:
batch = batch.to(device)
# 🔥 Generate dynamic supervision mask BEFORE forward pass
mask = model.get_mask(batch.num_nodes, rate=mask_rate, device=device)
# Forward pass using masked input
out = model(batch.pos, batch.signal, batch.edge_index, batch.edge_attr, mask)
# Compute loss only on supervised nodes
loss = criterion(out[mask], batch.signal[mask])
mean_loss += loss.item()
return mean_loss / len(dataloader)
⚙️ Training Setup#
We now configure the components needed to train the model:
Device Selection
Automatically use GPU (cuda:0) if available; otherwise fall back to CPU.Model Instantiation
Initialize theBasicNetmodel with:Positional feature size (
data.pos.shape[1])Signal feature size (
data.signal.shape[1])Hidden channels set to 64.
Loss Function
We use Mean Squared Error (MSELoss) because the task is a regression problem (predicting continuous sine waves).Optimizer
Adam optimizer is used for its efficiency and robustness in training deep models.Early Stopping
AnEarlyStopperis set up with:patience=10(number of epochs without improvement before stopping)min_delta=0.0(smallest improvement to be considered progress)
Training State Variables
loss_trainandloss_valstore the loss history.best_losstracks the best validation loss seen so far.PATH_CHECKPOINTdefines where to save the best model weights.
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
# device = torch.device('cpu')
model = BasicNet(data.pos.shape[1], data.signal.shape[1], hidden_channels=256).to(device)
criterion = torch.nn.MSELoss() # Define loss criterion.
# criterion = torch.nn.SmoothL1Loss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001) # Define optimizer.
early_stopper = EarlyStopper(patience=10, min_delta=0.0)
loss_train = []
loss_val = []
best_loss = 1
best_epoch = 0
PATH_CHECKPOINT = "./checkpoint/best_masked.pt"
# Create the folder if it doesn't exist
os.makedirs(os.path.dirname(PATH_CHECKPOINT), exist_ok=True)
mask_rate = 0.3
model
BasicNet(
(mlp_in): MLP(27, 256)
(conv): GATv2Conv(256, 256, heads=1)
(conv2): GATv2Conv(256, 256, heads=1)
(mlp_out): MLP(256, 25)
)
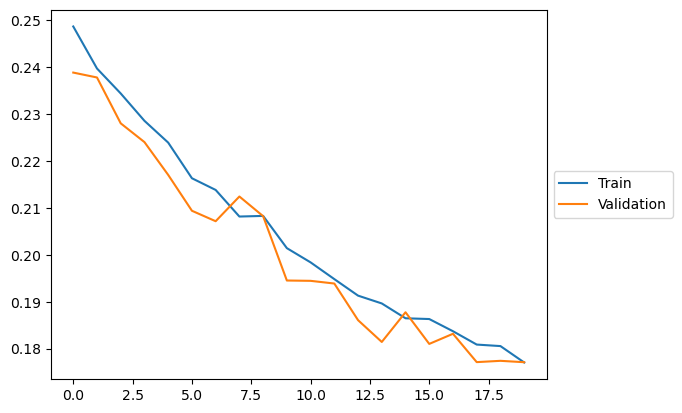
🔁 Training Loop#
We now launch the model training:
Loop over a maximum of 5000 epochs.
For each epoch:
Perform a full pass over the training data and compute the mean training loss.
Perform a full pass over the validation data and compute the mean validation loss.
Update the training progress bar with the latest losses.
If the validation loss improves, save the model checkpoint.
If early stopping criteria are met, stop training early.
📈 Monitoring:#
We use
tqdmto display a live progress bar with the latest training and validation loss.The best model (lowest validation loss) is saved automatically to
PATH_CHECKPOINT.
🧠 Reminder:
Dynamic masking is used both during training and validation, so different nodes are randomly supervised in every batch.
🧠 Input Masking Strategy: Preventing Cheating#
Unlike typical label masking or partial supervision,
we use masking to deliberately corrupt node inputs during training.
For each training node, its own input signal is zeroed out.
The model cannot access its own signal directly.
It must reconstruct the missing signal using only its neighbors via message passing.
✅ All nodes still participate fully in the graph structure.
✅ Only the input features of supervised nodes are masked.
Training flow:
Full graph is built.
Input signal of supervised nodes is zeroed out.
Message passing happens across the entire graph.
Loss is computed only at the masked (supervised) nodes.
Gradients update the model to better reconstruct missing signals.
🧠 This approach forces the GNN to learn meaningful spatial patterns,
and mimics real-world situations like seismic networks, GNSS, or sensor fields,
where some stations may be missing data and need to interpolate intelligently.
start_time = time.perf_counter()
nb_epoch = tqdm(range(20))
for epoch in nb_epoch:
loss_train.append(train(train_loader, device, mask_rate))
loss_val.append(validation(val_loader, device, mask_rate))
if loss_val[-1] < best_loss:
best_loss = loss_val[-1]
best_epoch = epoch
torch.save(model.state_dict(), PATH_CHECKPOINT)
if early_stopper.early_stop(loss_val[-1]):
print(f"early stopping at epoch {epoch}: train loss={loss_train[-1]}, val loss={loss_val[-1]}")
break
nb_epoch.set_postfix_str(f"train loss={loss_train[-1]}, val loss={loss_val[-1]}")
100%|██████████| 20/20 [02:08<00:00, 6.41s/it, train loss=0.17703746424780953, val loss=0.17709419876337051]
plt.plot(loss_train, label="Train")
plt.plot(loss_val, label = "Validation")
plt.legend(loc='center left', bbox_to_anchor=(1, 0.5))
<matplotlib.legend.Legend at 0x7f47f92a3350>
🧪 Model Evaluation#
After training, we evaluate the model’s performance on the test set.
🎯 Evaluation Goals:#
Measure how well the model can predict the full sine wave at each node.
Assess overall performance with quantitative metrics (like Mean Absolute Error).
Visualize individual predictions to qualitatively inspect model behavior.
🚦 Key Differences from Training:#
No dynamic masking during evaluation:
We want to predict the full signal at every node, not just a subset.
A mask of all
Falsevalues is passed to the model to disable input corruption.
Full supervision:
The loss and metrics are computed across all nodes without random sampling.
📊 Evaluation Metrics:#
Mean Absolute Error (MAE):
Measures the average absolute difference between predicted and true signals at each node.Histogram of per-node errors:
Helps understand the distribution of prediction errors across the entire test set.Qualitative plots:
Overlay predicted and true sine waves for random sample nodes to visually inspect performance.
🧠 Reminder:
Even though the model was trained with incomplete (masked) signals, during evaluation we test its ability to recover the entire signal at every node.
# restore best model
# PATH_CHECKPOINT = "./checkpoint/best_masked.pt"
# actually use a pretrained one on GPU
PATH_CHECKPOINT = "./best_node_reg.pt"
model.load_state_dict(torch.load(PATH_CHECKPOINT, map_location='cpu'))
print(f"best loss={best_loss}, model eval loss={validation(val_loader, device, mask_rate)} at epoch {best_epoch}")
best loss=0.17709419876337051, model eval loss=0.11411901749670506 at epoch 19
🛠️ Evaluation Function#
We define an evaluate() function to test the model’s performance on the full test set.
Key differences compared to training:
No dynamic masking:
We pass a “no mask” (allFalse) tensor to the model. This ensures full input signals are used for prediction.Full node supervision:
The loss and metrics are computed across all nodes, not just a random subset.
📋 Function Behavior:#
Perform a forward pass through the model for each batch in the test set.
Compute the Mean Absolute Error (MAE) for each batch.
Stack all predicted signals and ground truth signals for further visualization.
📤 Function Outputs:#
mean_mae: Average Mean Absolute Error across all nodes in the test set.pred_all: Stacked predictions for all nodes.true_all: Stacked ground truth sine waves for all nodes.
🧠 Reminder:
Evaluating on full signals allows us to truly assess how well the model reconstructs complete sine waves at each node.
@torch.no_grad()
def evaluate(model, dataloader, device):
"""
Evaluate the model on the full test set without dynamic masking.
Args:
model : Trained model
dataloader : DataLoader for the test set
device : torch.device
Returns:
mean_mae : float — Mean Absolute Error across all nodes
pred_all : Tensor — Predicted signals (stacked) [num_nodes, signal_size]
true_all : Tensor — Ground truth signals (stacked) [num_nodes, signal_size]
"""
model.eval()
total_mae = 0
pred_all = []
true_all = []
for batch in dataloader:
batch = batch.to(device)
# Create a zero mask → No input corruption during final evaluation
no_mask = torch.zeros(batch.num_nodes, dtype=torch.bool, device=device)
# Forward pass
out = model(batch.pos, batch.signal, batch.edge_index, batch.edge_weight, no_mask)
# Accumulate outputs
pred_all.append(out.cpu())
true_all.append(batch.signal.cpu())
# Calculate MAE for the batch
batch_mae = torch.mean(torch.abs(out - batch.signal))
total_mae += batch_mae.item()
# Aggregate
mean_mae = total_mae / len(dataloader)
pred_all = torch.cat(pred_all, dim=0)
true_all = torch.cat(true_all, dim=0)
return mean_mae, pred_all, true_all
🔍 Prediction and Visualization#
After evaluating the model numerically, it is crucial to visualize how well it is reconstructing the node-level sine waves.
We perform two types of visual inspections:
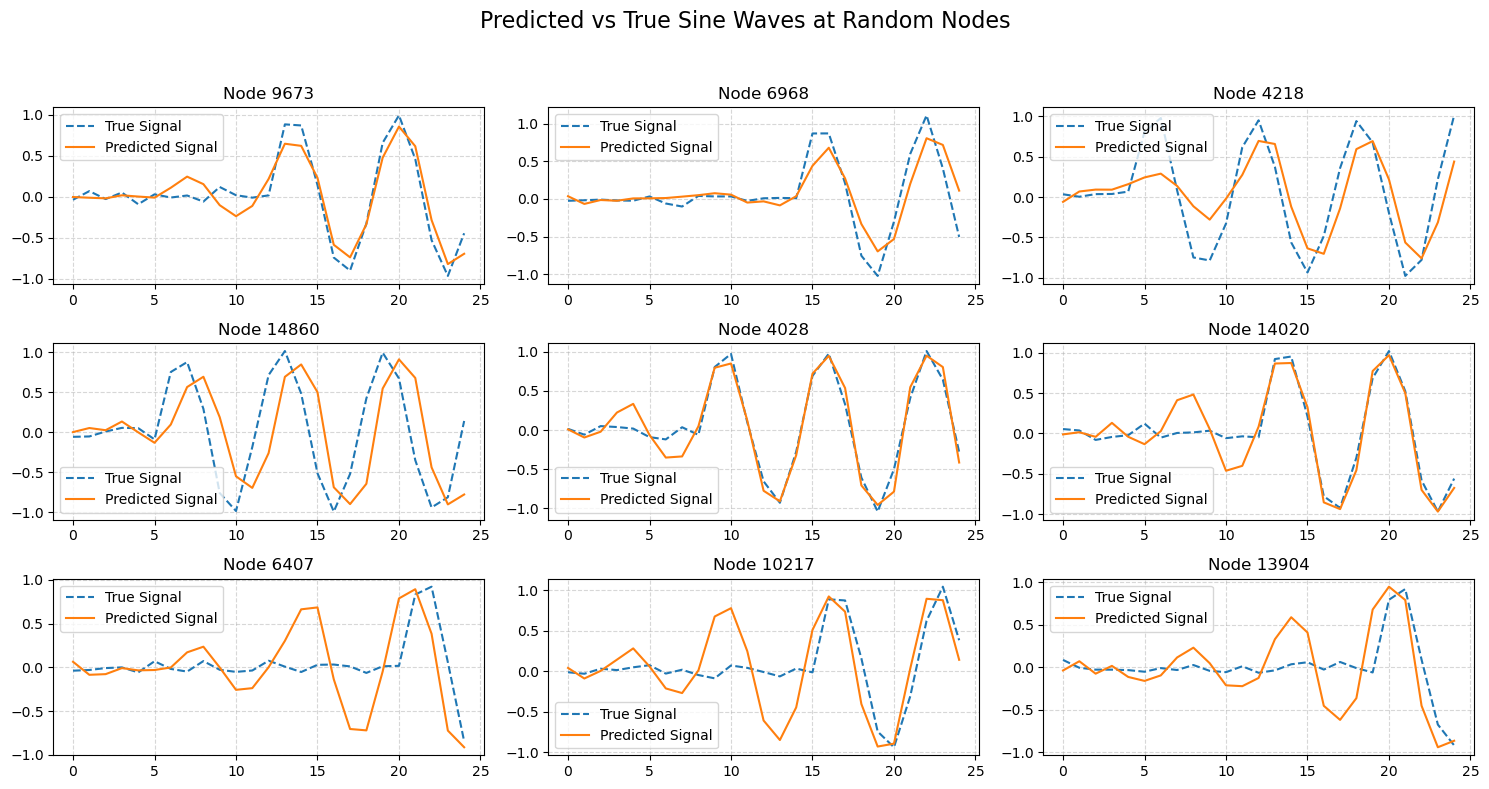
🎯 1. Random Node Signal Comparison#
Randomly select a few nodes from the test set.
Plot both the true sine wave and the predicted sine wave for each node.
This helps us visually inspect how well the model captures the correct waveform shapes.
🧠 Note:
Perfect predictions would show overlapping dashed (true) and solid (predicted) lines.
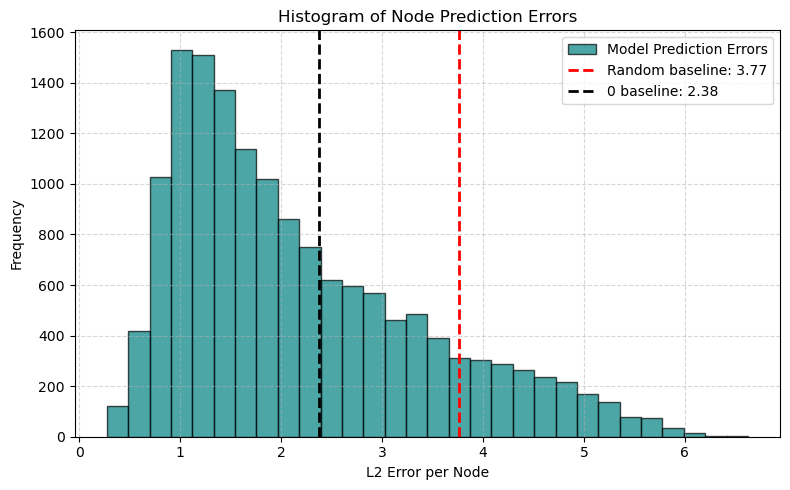
📊 2. Histogram of Node Prediction Errors#
Compute the L2 norm (Euclidean distance) between the predicted and true signals at each node.
Plot a histogram showing the distribution of node-wise errors across the entire test set.
This helps answer questions like:
Are most predictions very close?
Are there occasional large errors (outliers)?
🚦 Goal:
Ideally, the histogram is skewed toward small errors, indicating most nodes are well predicted!
# --- Predict and gather outputs ---
mean_mae, pred_all, true_all = evaluate(model, test_loader, device)
print(f"Mean Absolute Error (MAE) on Test Set: {mean_mae:.4f}")
Mean Absolute Error (MAE) on Test Set: 0.3279
# --- Compute per-node L2 errors ---
node_errors = torch.norm(pred_all - true_all, dim=1).numpy()
# --- Estimate random prediction baseline ---
# Random predictions between -1 and 1 (since tanh activation output is bounded)
rand_preds = 2 * torch.rand_like(true_all) - 1 # Uniform random between [-1, 1]
rand_errors = torch.norm(rand_preds - true_all, dim=1).numpy()
expected_random_error = rand_errors.mean()
pred_0 = torch.zeros(true_all.shape)
pred_0_errors = torch.norm(pred_0 - true_all, dim=1).numpy()
expected_pred_0_error = pred_0_errors.mean()
# --- Plot
plt.figure(figsize=(8, 5))
plt.hist(node_errors, bins=30, alpha=0.7, color='teal', edgecolor='black', label="Model Prediction Errors")
plt.axvline(expected_random_error, color="red", linestyle="--", linewidth=2, label=f"Random baseline: {expected_random_error:.2f}")
plt.axvline(expected_pred_0_error, color="black", linestyle="--", linewidth=2, label=f"0 baseline: {expected_pred_0_error:.2f}")
plt.xlabel("L2 Error per Node")
plt.ylabel("Frequency")
plt.title("Histogram of Node Prediction Errors")
plt.legend()
plt.grid(True, linestyle="--", alpha=0.5)
plt.tight_layout()
plt.show()
# --- Pick random nodes ---
num_samples = 9
random_indices = random.sample(range(pred_all.shape[0]), num_samples)
fig, axs = plt.subplots(3, 3, figsize=(15, 8))
axs = axs.flatten()
for i, idx in enumerate(random_indices):
axs[i].plot(true_all[idx].numpy(), label="True Signal", linestyle='--')
axs[i].plot(pred_all[idx].numpy(), label="Predicted Signal", linestyle='-')
axs[i].set_title(f"Node {idx}")
axs[i].legend()
axs[i].grid(True, linestyle="--", alpha=0.5)
plt.suptitle("Predicted vs True Sine Waves at Random Nodes", fontsize=16)
plt.tight_layout(rect=[0, 0, 1, 0.95])
plt.show()
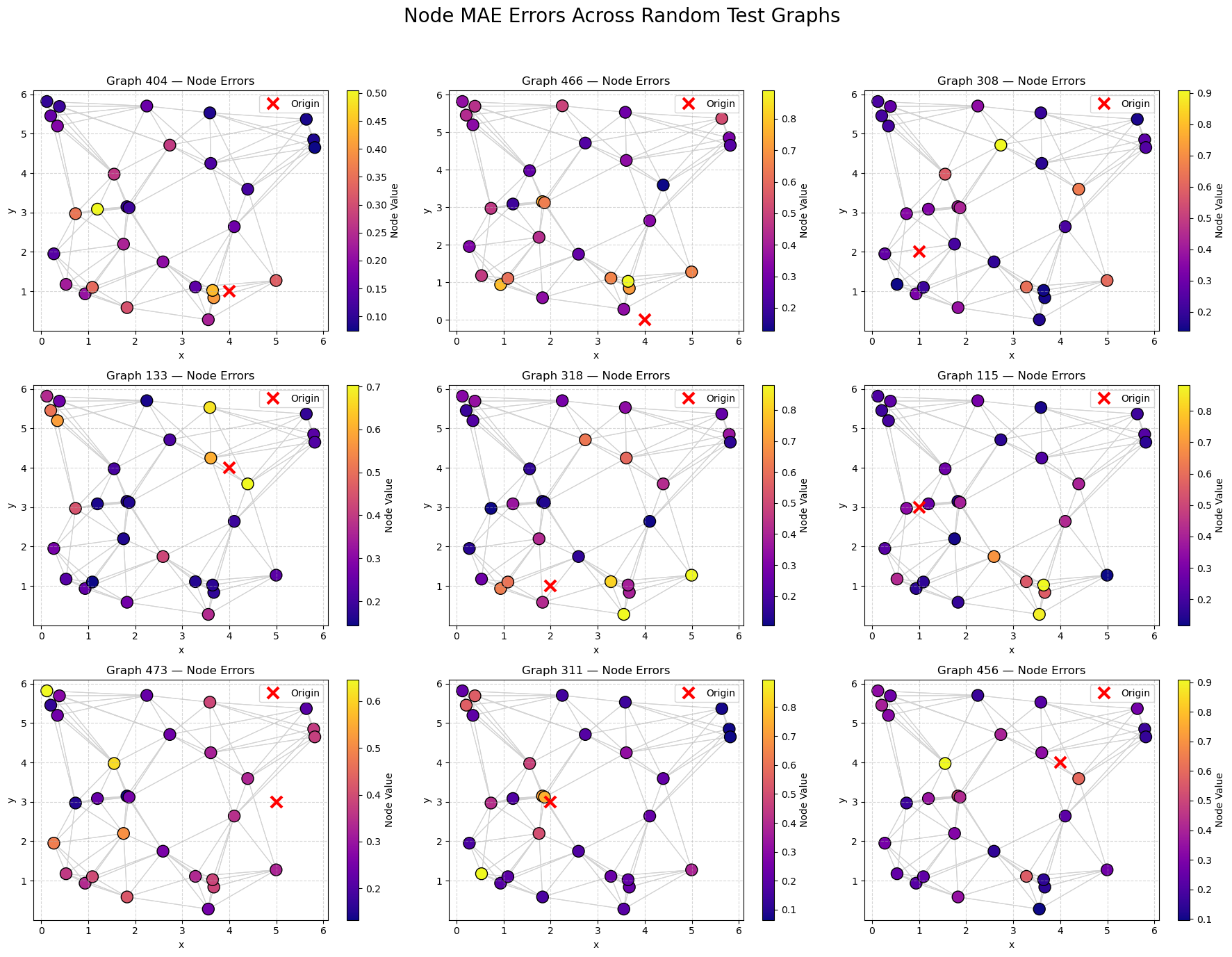
🌐 Spatial Visualization of Node Errors#
To better understand where the model performs well (or poorly),
we visualize the spatial distribution of node-level errors across multiple random test graphs.
For each selected graph:
Nodes are colored according to their Mean Absolute Error (MAE) between predicted and true signals.
Edges are shown in light gray to illustrate graph connectivity.
A colorbar indicates the magnitude of error at each node.
🧠 Interpretation:#
Lower-error nodes (dark blue) suggest the model can accurately reconstruct the signal.
Higher-error nodes (yellow/green) highlight more challenging areas.
By comparing graphs, we can investigate if node density and connectivity correlate with prediction quality.
🔍 Hypothesis:
Nodes in densely connected areas should have lower errors, as the model can better leverage neighbor information.
# --- Sample 9 graphs randomly ---
sample_graph_indices = random.sample(range(len(test_dataset)), 9)
fig, axs = plt.subplots(3, 3, figsize=(18, 14))
axs = axs.flatten()
node_pointer = 0
for i, graph_idx in enumerate(sample_graph_indices):
g = test_dataset[graph_idx]
num_nodes = g.pos.shape[0]
# Extract predictions and truths for this graph
preds = pred_all[node_pointer:node_pointer + num_nodes]
trues = true_all[node_pointer:node_pointer + num_nodes]
# Compute per-node MAE
node_errors = torch.mean(torch.abs(preds - trues), dim=1).numpy()
# --- Use the new helper to plot into specific axis
visualize_graph_torch(
g,
node_values=node_errors,
cmap="plasma",
ax=axs[i],
title=f"Graph {graph_idx} — Node Errors"
)
node_pointer += num_nodes
# Hide any unused subplots (shouldn't happen since we picked exactly 9)
for j in range(len(sample_graph_indices), len(axs)):
axs[j].axis('off')
plt.suptitle("Node MAE Errors Across Random Test Graphs", fontsize=20)
plt.tight_layout(rect=[0, 0, 1, 0.95])
plt.show()
🏁 Conclusion#
In this notebook, we built and trained a Graph Neural Network (GNN) model for node-level sine wave reconstruction.
We covered the full workflow:
🛠️ Built a synthetic dataset with sine wave signals delayed by spatial distance.
🧠 Designed a custom GNN model (
BasicNet) combining signal feature extraction and attention-based message passing.🎯 Trained the model using dynamic masking to simulate incomplete input signals.
📈 Monitored training with early stopping and validation loss tracking.
🧪 Evaluated performance using:
Mean Absolute Error (MAE)
True vs Predicted signal plots
Histogram of node prediction errors
Spatial visualizations of node-level errors across graphs
🚀 Key Takeaways:#
GNNs can effectively reconstruct node-level signals even when only partial inputs are available.
Dense graphs (with strong neighbor connectivity) generally lead to better local predictions.
Visualization tools are crucial for both debugging and interpreting GNN behavior.
🔮 Possible Extensions:#
Test deeper GNN architectures (e.g., stacking multiple GATv2 layers).
Enrich edge features (e.g., relative positions, arrival time differences).
Experiment with different dynamic masking rates during training.
Explore more realistic datasets where node features evolve over time.
📚 Want to see GNNs applied to real geophysical data?#
If you’re interested in how Graph Neural Networks can be used beyond synthetic examples,
check out our recent work applying GNNs to denoise real daily GNSS time series in the Cascadia subduction zone:
Bachelot, L., Thomas, A. M., Melgar, D., Searcy, J., & Sun, Y.-S. (2025).
Cascadia Daily GNSS Time Series Denoising: Graph Neural Network and Stack Filtering.
Seismica, 2(4). https://doi.org/10.26443/seismica.v2i4.1419